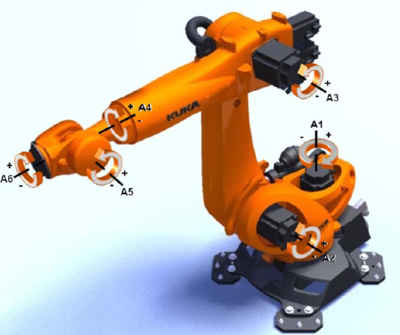
六關節工業機器人廣泛應用于模具制造等領域,其運動控制基于各關節的正負方向定義。以下是各關節正負方向的標準定義方法(通常遵循右手定則):
- 關節1(腰部旋轉軸):
- 正方向:從機器人頂部向下看,逆時針旋轉。
- 負方向:順時針旋轉。
- 關節2(肩部俯仰軸):
- 正方向:手臂向前(遠離基座)運動。
- 負方向:手臂向后(靠近基座)運動。
- 關節3(肘部俯仰軸):
- 正方向:前臂向上抬起。
- 負方向:前臂向下降低。
- 關節4(腕部旋轉軸):
- 正方向:手腕逆時針旋轉(沿前臂軸線)。
- 負方向:手腕順時針旋轉。
- 關節5(腕部俯仰軸):
- 正方向:手腕向上彎曲。
- 負方向:手腕向下彎曲。
- 關節6(腕部扭轉軸):
- 正方向:末端執行器逆時針扭轉。
- 負方向:末端執行器順時針扭轉。
在模具應用中,這些定義確保了機器人路徑規劃的精確性,例如在模具拋光或裝配時,正負方向的一致性可避免干涉并提高加工效率。實際應用中需參考具體機器人型號的坐標系說明,不同制造商可能略有差異。